


































According to our current knowledge, the existence of some kind of life on celestial bodies with subterranean oceans cannot be excluded, so they seem interesting targets for both researchers and ordinary people. One such celestial body is known as Jupiter’s moon Europa, to which its first target spacecraft, Europa Clipper, could launch in 2024. This spacecraft will not yet be equipped with a lander that will surface, but subsequent probes, either here or on Saturn’s moon Enceladus It will definitely have a probe that will allow us to look at the ocean. But how to explore these strange deep oceans?
The NASA Under the NIAC’s initiative to support innovative concepts, a design for robots that can go into ice, which was developed by a research group of JPL Propulsion Laboratory employees, received a grant of $600,000. (A lower amount was received for the same device a year ago for a feasibility study).
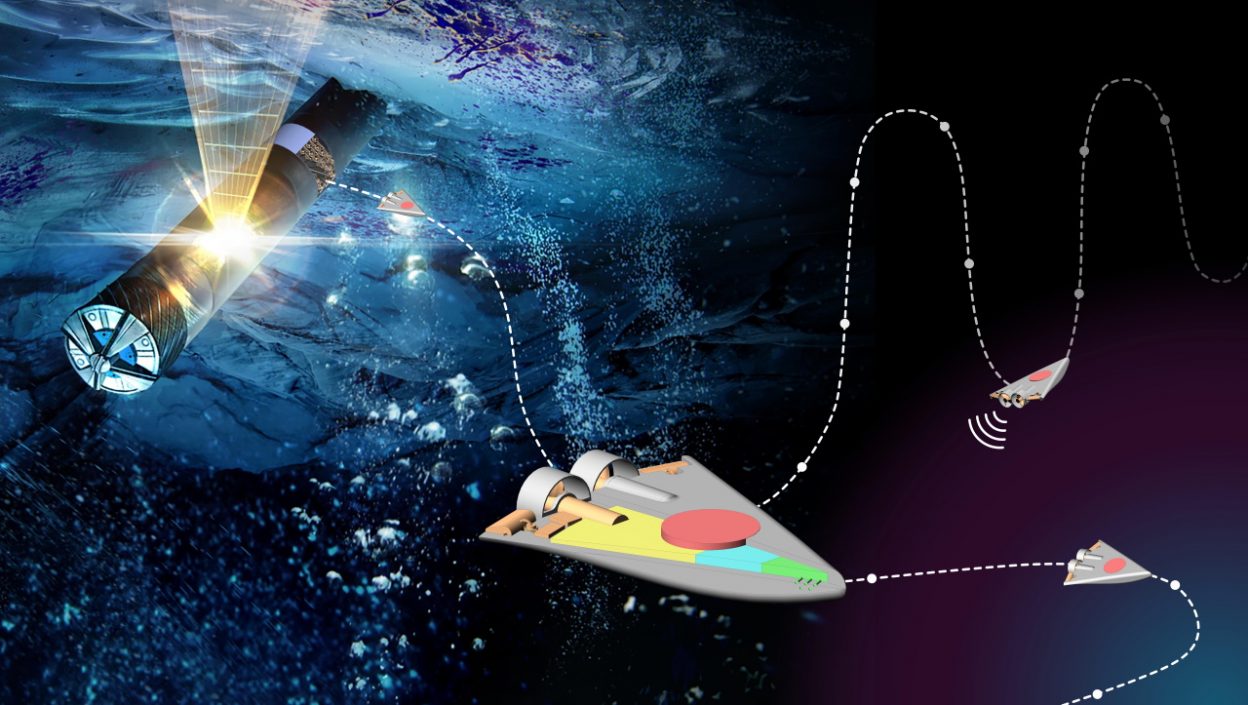
Exploring the world beneath Europa’s icy crust: Beneath the lander, a submarine melts into the ice, which, once in the liquid ocean, fires up tiny phone-sized robots.
Source: NASA JPL
The device, which has the acronym SWIM (meaning swimming), consists of a “mother ship” that propels itself through the ice crust layer by melting, and approx. It consists of a team of floating robots the size of mobile phones. The mother ship arriving under the crust, into the liquid ocean, will launch tiny robots from below, which will monitor and take measurements in the subsurface ocean as it swims, looking for signs of life — at least that’s the dream of mechanical robotics engineer Ethan Schaller, JPL researcher and developer and member in his group. Schaler’s range of devices can enter the next phase thanks to the support it just received, and prototype devices can also be produced using 3D printing based on plans.
The researcher’s biggest innovation is that these miniature swimming robots are much smaller than those dreamed up by probes of other planets, and this allows them to be “packed” into another device and brought to the depths of the ocean. Forty of the 12-cm wedge-shaped robots can be packed into a small section, 15 percent of the 25-cm-diameter probe passing under the ice, leaving plenty of room for additional instruments.
For safety reasons, the sub-ice unit is connected to the ice-crust lander by a communication cable, but this limits the area the device can scan. The floating mini robots released from the unit can greatly expand the area to be explored!
In order to be able to melt the ice, a strong heat emission will be necessary, which in turn heats the water around the submersible unit and can change its chemical reactions, for example. This would provide false data about the ocean itself, which is why it is important for the miniature robots that take the measurements to move away from it and examine places where the heat has not yet affected the ocean.
Individual miniature robots can work with their own drive, on-board computer and sensors, and communicate with the submersible unit using ultrasound. The work that has just received support will also include the development of chemical sensors for robots, which will be used to detect potential traces of life.




